
Configurazione flessibile
INS Alte prestazioni
Multi-sensore
Configurazione flessibile
INS Alte prestazioni
Multi-sensore
Su questa pagina:
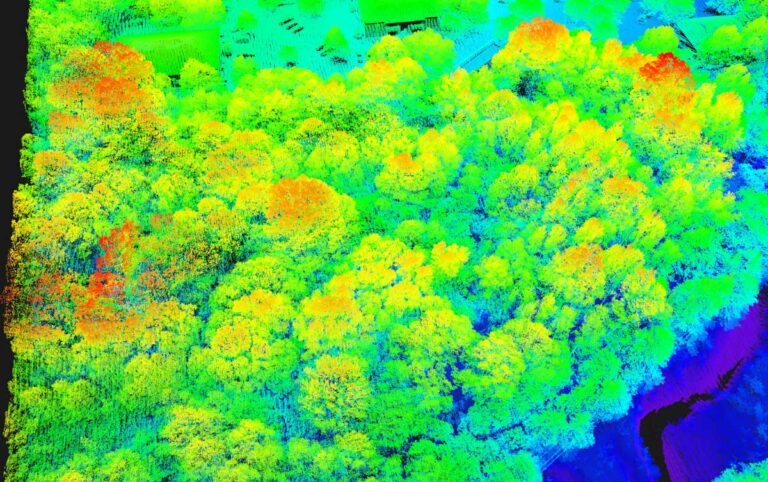
La serie XFLY integra un Sistema di Navigazione Inerziale (INS) ad alte performance con fotocamera e LiDAR per creare nuvole di punti. È possibile soddisfare le esigenze dei clienti scegliendo una portata di 120 o 300 metri, 2 o 3 echi o altri sensori.
La piattaforma di elaborazione include un’interfaccia Wi-Fi, un modem cellulare incorporato per le correzioni RTCM, un software di registrazione dei dati e una rete Ethernet gigabit.
Dotato di un INS ad alte prestazioni, fornisce nuvole di punti pulite anche ad alta quota. Essendo un sistema piccolo, leggero e a basso consumo, consente all’utente di volare più a lungo, adattandosi alle esigenze di qualsiasi progetto.
Il software analizza e corregge i disallineamenti tra l’INS e il LiDAR e georeferenzia i dati in un sistema di coordinate geografiche. La traiettoria INS post-elaborata, i file di scansione LiDAR e le immagini della telecamera vengono convertiti in nuvole di punti in formato LAS per un’ulteriore elaborazione.


PRECISIONE
Grazie alle elevate prestazioni dell’INS assistito dal GPS, è possibile ottenere un’accuratezza della nuvola di punti fino a 3-5 cm.
QUOTA DI VOLO 200m
Vola fino a 200 metri sopra il terreno.
CAMERA
La camera da 24 MP aggiunge il colore ai dati. La camera viene consegnata al cliente già calibrata e con questi valori di correzione già salvati sul dispositivo.
VOLA & GUIDA
Vengono offerti diversi supporti per supportare il montaggio su noti veicoli UAV e altre piattaforme, come le automobili.
PPK/RTK DUAL/SINGLE GNSS
In base all’applicazione del cliente, è possibile scegliere se si desidera un’antenna GNSS singola o doppia frequenza. Per chi vuole evitare la post-elaborazione, è disponibile anche la soluzione RTK.
PICCOLO E LEGGERO
Il design piccolo e leggero dell’XFLY lo rende altamente portatile


testo


L’asta telescopica consente di montare l’XVS per la scansione delle aree di difficile accesso delle facciate degli edifici.

No, it is not mandatory. You can choose to collect data using the Android App, in case you need to see the real time preview point cloud. Otherwise, the power button of the device can work as scanning start and stop.
Yes, darkness affects neither the geometric data nor the intensity of the point cloud.
Only the color information will not be usable, having taken dark photographs.
The range shown on the brochure represents the maximum distance achieved by the lidar.
However, you have to keep in mind that in order for the SLAM algorithm to be able to process the cloud optimization, you must have geometric elements within the 50-meter range. Therefore, it is not recommended to work in environments that are too open, with no buildings or objects around.
Certainly, the first benefit of using RTK is to have the 3D model georeferenced, without the need to collect GCPs. In open environments, it can also help the SLAM algorithm in improving the final restitution.
In general, it is not mandatory: the heterogeneity of the environment may be sufficient. On the contrary, if you are in a difficult situation for SLAM, closing the loop means adding a constraint that helps the system.
Scopri come un laser scanner SLAM può essere molto utile in ogni ambiente
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Donec tincidunt eleifend quam, non imperdiet est tristique suscipit. Nunc luctus rutrum neque, nec facilisis velit interdum eget.
* Mandatory field
* Campo obbligatorio
Rimani aggiornato sulle ultime novità, prodotti, promozioni
ed eventi dal mondo Stonex.





