
GOapp
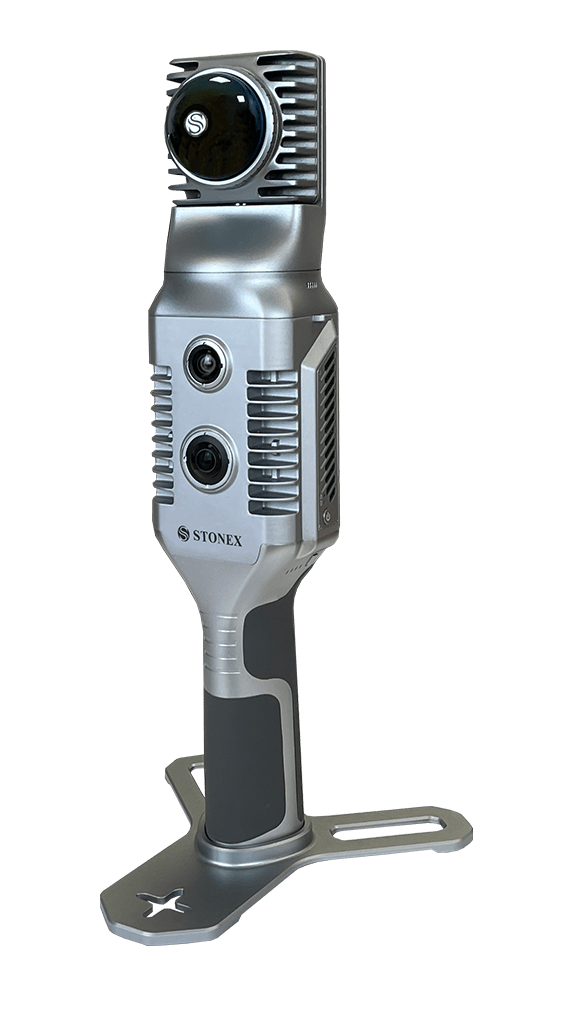
GOapp è l’applicazione mobile dedicata agli SLAM Stonex per gestire progetti, visualizzare cloud di punti in tempo reale, visualizzare l’anteprima delle immagini, aggiornare il firmware e altre operazioni. L’APP funziona sui sistemi operativi Android e iOS.

GOpost
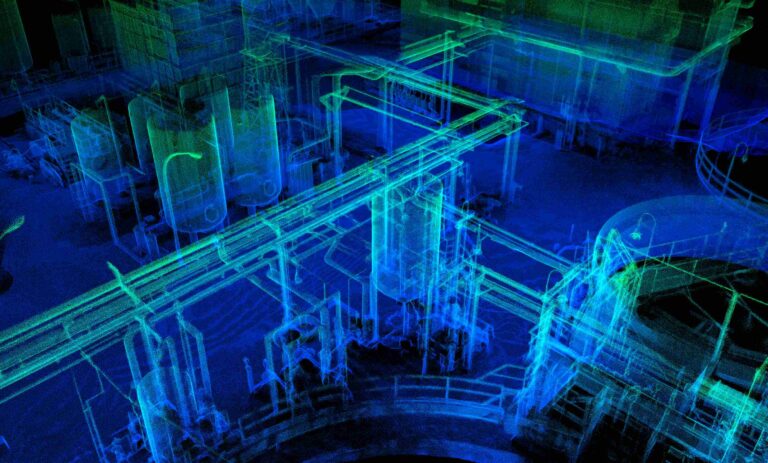
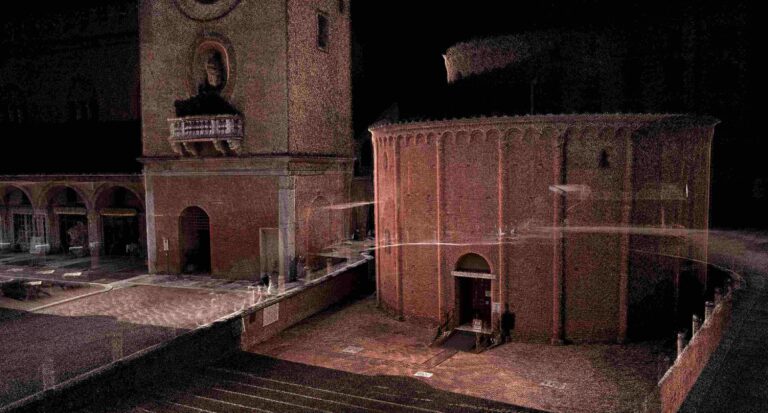
Software di post-elaborazione per Windows che esegue ottimizzazione, colorazione delle nuvole di punti, filtraggio e rimozione rumore. È inoltre possibile importare punti di controllo per georeferenziare la nuvola di punti.












Rimani aggiornato sulle ultime novità, prodotti, promozioni
ed eventi dal mondo Stonex.





