
Negli ultimi anni abbiamo visto come la tecnologia Lidar abbia conquistato il mercato in modo straordinario. L’affidabilità della cattura, la precisione e la velocità di acquisizione sono fattori che sono stati decisivi nella diffusione di questa tecnologia. Inoltre, negli ultimi 10 anni
Anche la fotogrammetria e la visione artificiale nel campo del rilevamento basato su immagini si sono evolute in modo impressionante negli ultimi anni. È ora possibile calcolare punti omologhi da centinaia di immagini con notevole affidabilità e flessibilità. I processi sono ora molto più rapidi e accurati, grazie anche al miglioramento delle tecniche di orientamento interno, e le texture hanno una risoluzione più elevata con un migliore bilanciamento.
Questo scenario ha permesso lo sviluppo di un nuovo scanner: Stonex XVS vSLAM 3D Scanner; una nuova categoria di strumenti, che incorpora un sistema di scansione 3D basato su immagini in tempo reale. XVS utilizza due telecamere: la prima per la localizzazione simultanea delle apparecchiature in tempo reale (Visual SLAM) e l’altra per catturare immagini ad alta risoluzione e di alta qualità. Lo scanner è collegato via cavo ad un tablet dotato di un software in grado di guidare l’utente durante l’acquisizione, fornendo in tempo reale tutte le informazioni riguardanti i dati raccolti e la traiettoria.
L’utente cammina e scansiona in modo semplice ed intuitivo, muovendosi liberamente nello spazio. Questa semplicità di utilizzo permette di effettuare scansioni molto lunghe senza stancarsi e senza perdere alcun dato (abbiamo effettuato acquisizioni di più di un’ora). Ciò non significa che non sia possibile acquisire scansioni diverse che potranno poi essere automaticamente unite successivamente per aumentare la comodità dell’utente.
TELECAMERE E SLAM VISIVA
XVS è costituito da due telecamere e un sistema di misurazione inerziale (IMU). La prima telecamera, utilizzata per Visual SLAM insieme al sistema di guida, abilita una funzione essenziale: è la garanzia che l’acquisizione sul campo venga eseguita in modo tale che i dati elaborati siano di alta qualità. Questo metodo di raccolta dati permette di essere sicuri che i modelli saranno sempre collegati e che non ci saranno errori durante l’elaborazione.
Questo è un fattore molto importante, poiché la fotogrammetria classica e la maggior parte dei sensori basati su immagini non possono garantire la stessa qualità unita alla facilità e velocità di acquisizione. Con altri strumenti c’è sempre l’incertezza di aver raccolto dati precisi e il rischio di dover tornare sul sito per acquisire nuovamente i dati mancanti.
L’altra fotocamera ha una risoluzione di 5 megapixel con un sensore da 2/3″ e una dimensione dei pixel di 3,45 micron. Il sensore è del tipo con otturatore globale che consente all’utente di spostare la fotocamera senza distorcere l’immagine. È importante notare che i sensori di smartphone e tablet utilizzano la tecnologia rolling shutter e potrebbero presentare piccole deformazioni nell’immagine che influiscono sulla precisione delle misurazioni, se si decide di raccogliere dati fotogrammetrici con questi dispositivi.
Il sistema di misura inerziale (IMU) viene utilizzato per livellare lo scanner e per stabilire i valori iniziali di orientamento interno che, insieme a quelli risultanti dal Visual SLAM, massimizzano le possibilità di successo nelle ricostruzioni 3D con traiettorie molto complesse.
SELEZIONE AUTOMATICA DELLE IMMAGINI
Durante una raccolta dati, XVS cattura centinaia di immagini al minuto. È comprensibile pensare che né l’elaborazione di tutte le immagini né la selezione sistematica possano essere soluzioni accettabili ai fini dell’elaborazione dei dati. Pertanto, durante la progettazione dello scanner XVS, è stato sviluppato un sistema intelligente di selezione automatica delle immagini. Questo è un prodotto della tesi di dottorato di Pedro Ortiz Coder
Questa selezione automatica viene effettuata con cura. L’algoritmo proprietario seleziona le immagini migliori in base a molteplici fattori: distanza dell’oggetto, velocità dell’utente, corrispondenza dell’immagine, qualità dell’immagine/campo visivo, ecc. Ciò aumenta la precisione delle immagini selezionate.
RICOSTRUZIONE SPECIFICA 3D
La procedura prosegue con l’orientamento interno delle immagini. A questo punto viene utilizzata la calibrazione interna della fotocamera fotogrammetrica e viene prestata particolare attenzione a massimizzare la precisione. L’orientamento interno ricalcola i punti omologhi raccolti durante la ripresa videogrammetrica in cattura continua.
CASO STUDIO: BASÍLICA DEL TRAMPAL
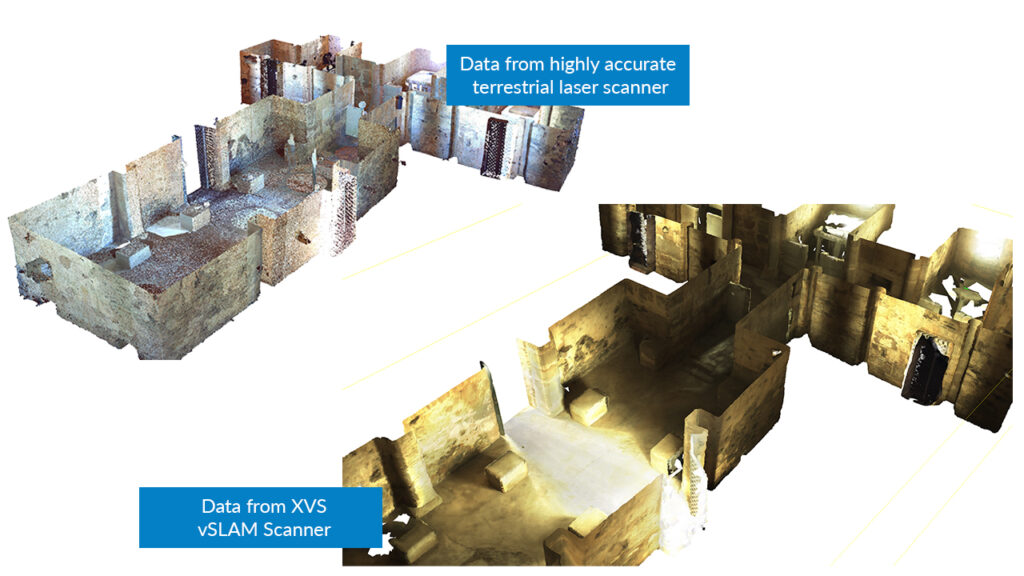
Per dimostrare le capacità di questo nuovo sistema videogrammetrico, è stata eseguita una scansione dell’interno e dell’esterno della Basilica visigota di Santa Lucia del Trampal, ad Alcuescar, in Spagna. Questa basilica risale originariamente al VII secolo, anche se da allora ha subito numerose modifiche importanti. Attualmente è l’unico edificio visigoto in buone condizioni situato nella parte meridionale della penisola iberica.
Per questa scansione abbiamo utilizzato lo scanner Stonex XVS e sono stati rilevati 10 punti all’esterno della basilica con un GNSS-GPS. La scansione esterna ha richiesto 5 minuti mentre la scansione interna ha richiesto 9 minuti. La scansione interna viene avviata e terminata sulla facciata esterna, con l’obiettivo di allineare automaticamente entrambe le aree. Durante la scansione è stato utilizzato per la raccolta dati il software XVS app (installato su un tablet Microsoft Surface Pro) che permette di gestire tutti i parametri ed avere tutte le informazioni fondamentali in tempo reale. Per l’elaborazione dei dati è stato utilizzato il software XVS cloud, che raccoglie le informazioni e le invia a un server con i parametri impostati dall’utente. Tra gli altri parametri è possibile selezionare la qualità della mesh, che in questo caso era di media qualità.
Per confrontare i dati è stata eseguita una scansione con un laser scanner terrestre ad alta precisione, che è stato posizionato in 16 posizioni diverse e sono state utilizzate sfere per aumentare la precisione della registrazione. Il risultato del confronto tra i modelli di scanner (laser scanner e scanner videogrammetrico) mostra una deviazione minima:
La distanza media tra i due modelli è di 4 mm all’esterno (Sigma=0,07) e 10 mm all’interno (Sigma=0,04).
In conclusione, lo scanner videogrammetrico rappresenta senza dubbio un’alternativa veloce e precisa agli scanner statici e dinamici disponibili sul mercato, con risultati fantastici in termini di qualità delle texture. Lo scanner videogrammetrico XVS si è rivelato maneggevole, leggero e facile da usare. Grazie alla sua semplicità d’uso è uno strumento utilizzabile anche da persone non specializzate nel campo delle misurazioni.
Per le sue caratteristiche, XVS funziona molto bene con texture eterogenee, motivo per cui i principali campi di applicazione includono l’archeologia, l’edilizia, l’architettura, i beni culturali, l’urbanistica, la ricostruzione degli incidenti e la geologia.
XVS si è rivelato un sistema estremamente semplice e flessibile, ma anche preciso e potente. È adatto sia agli esperti che ai principianti ed è in grado di effettuare lunghe acquisizioni senza problemi. Può gestire acquisizioni brevi, che possono essere unite successivamente senza problemi di allineamento, grazie alle caratteristiche del sistema.
bibliografia
[1]. Bosse, Michael & Zlot, Robert & Flick, Paul. (2012). Zebedee: Progettazione di un sensore di portata tridimensionale montato a molla con applicazione alla mappatura mobile. IEEE Transactions on Robotics. 28. 1104-1119. 10.1109/TRO.2012.2200990.
[2]. Pedro Ortiz Coder. Anno 2021. Titolo: Reconstrucción 3d a través de un sistema videogramétrico basado en la utilización de visualslam y un procedimiento específico de selección de imágenes. Deposito Dehesa. ID: http://hdl.handle.net/10662/12319