
Flexible configuration
High performance INS
Multi-sensor
Flexible configuration
High performance INS
Multi-sensor
On this page:
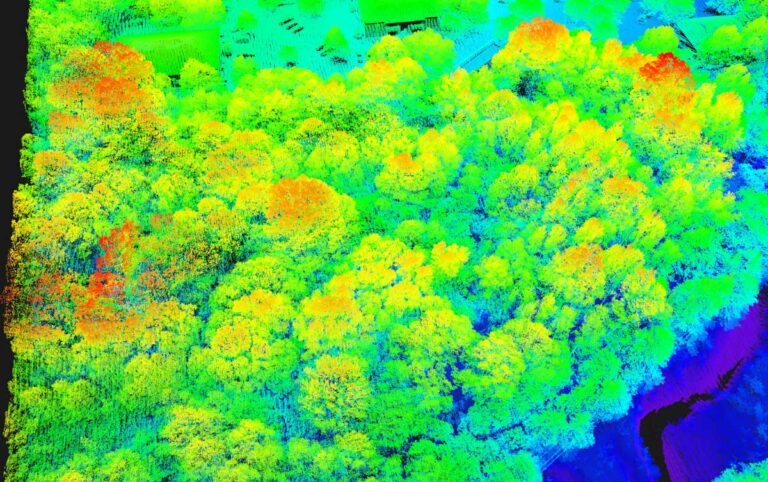
XFLY series integrates high performance Inertial Navigation System with camera and LiDAR for point cloud generation. Different customer’s need can be met by the choice of Hesai LiDAR XFLY120, XFLY300 or other sensors.
The processing platform contains a Wi-Fi interface, an embedded cellular modem for RTCM corrections, data logging software and a gigabit Ethernet network.
Equipped with a high-performance INS, it delivers clean point clouds even at high AGL. As a small, lightweight and low-power system, it allows the user to fly longer, adapting to the needs of any project. The post-processing software provides fully automatic point cloud generation.
The software observes and corrects misalignments between the INS and LiDAR, and georeferences the data into a geographic coordinate system. The post-processed INS trajectory, LiDAR scan files and camera images are converted to point clouds in LAS format for further processing.


ACCURACY
Thanks to high performances GPS-Aided INS, 3-5 cm point cloud accuracy can be achieved.
200M AGL
Fly up to 200 meter above ground level.
CAMERA
24 MP camera adds RGB information to the data. Camera comes to the customer already calibrated and with these boresighting values already saved onto the device.
FLY & DRIVE
Different mounts are offered to support the assembly onto well-known UAVs and other platforms, like cars.
PPK/RTK DUAL/SINGLE GNSS
Depending on customer’s application, choose whether you want single or dual GNSS antenna. For who wants to avoid post processing, Real Time Kinematic solution is also available.
SMALL & LIGHTWEIGHT
The small and lightweight design of the XFLY makes it highly portable


testo


The telescopic pole allows the XVS to be mounted for scanning difficult-to-access areas of building facades.

No, it is not mandatory. You can choose to collect data using the Android App, in case you need to see the real time preview point cloud. Otherwise, the power button of the device can work as scanning start and stop.
Yes, darkness affects neither the geometric data nor the intensity of the point cloud.
Only the color information will not be usable, having taken dark photographs.
The range shown on the brochure represents the maximum distance achieved by the lidar.
However, you have to keep in mind that in order for the SLAM algorithm to be able to process the cloud optimization, you must have geometric elements within the 50-meter range. Therefore, it is not recommended to work in environments that are too open, with no buildings or objects around.
Certainly, the first benefit of using RTK is to have the 3D model georeferenced, without the need to collect GCPs. In open environments, it can also help the SLAM algorithm in improving the final restitution.
In general, it is not mandatory: the heterogeneity of the environment may be sufficient. On the contrary, if you are in a difficult situation for SLAM, closing the loop means adding a constraint that helps the system.
Discover how a SLAM Laser Scanner can be very useful in every enviroment
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Donec tincidunt eleifend quam, non imperdiet est tristique suscipit. Nunc luctus rutrum neque, nec facilisis velit interdum eget.
* Mandatory field
Stay up to date with the latest news, products, promotions
and events from Stonex.





